
cs231n_3
Published:
CS231n: 3. Optimization: Stochastic Gradient Descent
太长不看
- loss 量化了 W 的质量。optimazation:寻找使 loss 最小的参数 W。从随机权重开始,迭代。
- 梯度下降:计算 loss 梯度,评估,沿反方向更新参数 W。
- 步长:学习率,必须恰到好处。
- mini-batch:一轮参数更新多次,实现更快收敛。
- SGD:迭代计算梯度并在循环中执行参数更新。
- SVM 的 cost function 是分段线性,碗状凸函数。
- 训练集:梯度下降,更新权重 W。验证集:选超参。
1. Introduction
- 图像分类任务关键:
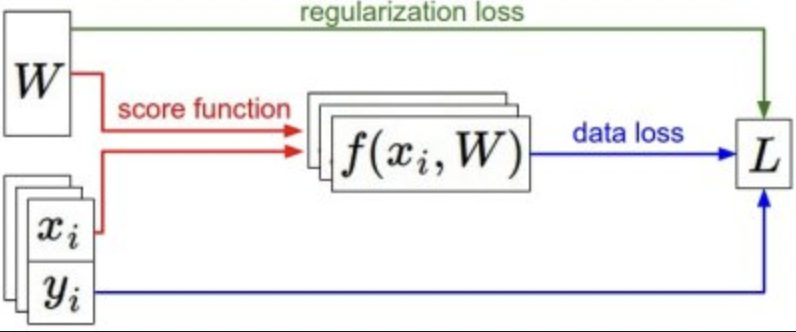
- score function 将原始数据映射到标签。(线性)
- loss function 衡量参数质量。(Softmax, SVM)data loss + regularization loss
- optimization 寻找使得损失函数最小化的参数 W。
- 后面将 线性映射 扩展到更复杂的神经网络,CNN,损失函数和优化过程不变。
2. Visualizing the loss function
- W 高维可视化困难,生成随机权重矩阵 W,对应空间中的单个点。然后往某个方向走,记录 loss。
假设随机方向 W1,loss 为 \(L(W + aW_1)\) a 的值作为 x 轴,loss 值作为 y 轴。损失函数表现为分段线性。 - 考虑一个简单的数据集,包含三个一维的点。完整的 SVM 损失: 三条折线。
x 轴为单个权重,y 轴为 loss。
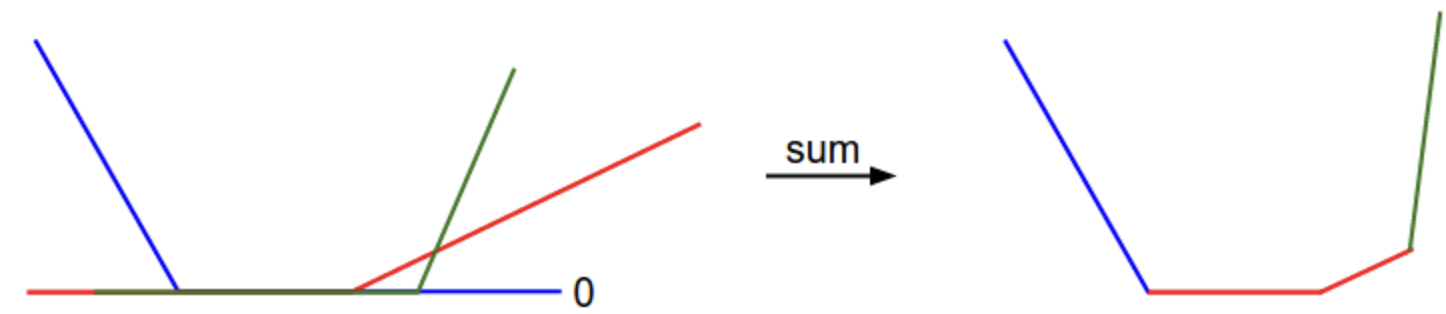
表现为凸函数,可以最小化。
但由于 max 操作,有拐点,该函数不可微分,因为拐点处梯度未定义。但是有 subgradient。
3. Optimization
损失函数:量化权重 W 的质量。
优化目标:找到使损失函数最小的 W。
Strategy #1: A first very bad idea solution: Random search
随机生成 W,记录最小 loss 时的 W。ACC 15.5%
核心思想:迭代。从一个随机的权重 W 开始,然后迭代改进。
蒙眼走路,到达最低点。
在 CIFAR-10 的示例中,山丘的维度为 30,730,因为 W 的维度为 10 x 3073。在山丘上的每个点,我们都会实现特定的损失(地形的高度)。
Our strategy will be to start with random weights and iteratively refine them over time to get lower lossStrategy #2: Random Local Search
随机向一个方向走,如果是下坡,即损失更低,迈出一步。ACC 21.4%Strategy #3: Following the Gradient
计算下降最快的方向。即梯度最大,每个维度的偏导数: \(\frac{df(x)}{dx} = \lim_{h->0}\frac{f(x+h) - f{x}}{h}\)
4. Computing the gradient
两种,数值梯度 慢近似,但是简单。解析梯度 快准确,但是需要微积分。
- Computing the gradient numerically with finite differences
有限差分。用上文偏导公式求梯度,用 h 值逼近。数值梯度评估复杂度高。
def eval_numerical_gradient(f, x):
"""
a naive implementation of numerical gradient of f at x
- f should be a function that takes a single argument
- x is the point (numpy array) to evaluate the gradient at
"""
fx = f(x) # evaluate function value at original point
grad = np.zeros(x.shape)
h = 0.00001
# iterate over all indexes in x
it = np.nditer(x, flags=['multi_index'], op_flags=['readwrite'])
while not it.finished:
# evaluate function at x+h
ix = it.multi_index
old_value = x[ix]
x[ix] = old_value + h # increment by h
fxh = f(x) # evalute f(x + h)
x[ix] = old_value # restore to previous value (very important!)
# compute the partial derivative
grad[ix] = (fxh - fx) / h # the slope
it.iternext() # step to next dimension
return grad
更新参数:沿梯度的负方向更新参数,因为希望损失函数减少。
- 步长:沿着该方向走多远,学习率。
- 小步长 持续,但缓慢。
- 大步长 变得快,但风险大。较大步长会升loss
# for step size 1.000000e-07 new loss: 2.135493
# for step size 1.000000e-06 new loss: 1.647802
# for step size 1.000000e-05 new loss: 2.844355
# for step size 1.000000e-04 new loss: 25.558142
- Computing the gradient analytically with Calculus
微积分。直接求梯度表达式。根据权重对损失函数微分。
5. Gradient Descent
- 梯度下降:重复计算损失函数的梯度,然后评估梯度,更新参数的过程。
在实践中,总是使用解析梯度,然后执行梯度检查,其中将其实现与数值梯度进行比较。
# Vanilla Gradient Descent
while True:
weights_grad = evaluate_gradient(loss_fun, data, weights)
weights += - step_size * weights_grad # perform parameter update
- Mini-batch gradient descent.
计算部分数据的梯度,然后更新参数。这样一轮可以更新很多次。
因为训练样本间有相关性,少量可以代表整体。小批量计算出的梯度近似整体。
通过计算 mini-batch 的梯度频繁更新参数,实现更快收敛。
# Vanilla Minibatch Gradient Descent
while True:
data_batch = sample_training_data(data, 256) # sample 256 examples
weights_grad = evaluate_gradient(loss_fun, data_batch, weights)
weights += - step_size * weights_grad # perform parameter update
- Stochastic Gradient Descent (SGD)
极端情况:batch 很小。同 “Batch gradient descent”。
batch 大小通常基于内存限制,或设置为 2 的幂:32,64. 因为许多向量化运算实现在其输入大小为 2 的幂时运算更快。
- 向前传递:计算 score,计算 loss,计算权重的梯度,更新参数 W。
总结
- loss 量化了 W 的质量。optimazation:寻找使 loss 最小的参数 W。从随机权重开始,迭代。
- 梯度下降:计算 loss 梯度,沿反方向更新参数 W。
- 步长:学习率,必须恰到好处。
- mini-batch:一轮参数更新多次,实现更快收敛。
- SGD:迭代计算梯度并在循环中执行参数更新。
- SVM 的 cost function 是分段线性,碗状凸函数。
- 如何计算任意 loss 的梯度?反向传播?链式法则?